
– Helios uses four arms (two extra) to maneuver and work in microgravity, replacing legs to enable movement and task performance without gravity.
– Its tendon-driven arm design, with motors at the shoulders and remote actuation via cables, aims to reduce weight and enable smooth, compliant movements; the elbow features a rolling contact joint for strength plus gentleness.
– The robot targets space-labor efficiency, aiming to cut crew time on maintenance and routine cargo tasks, reducing costs and freeing astronauts for higher-value science.
Overview of Helios Unveiling
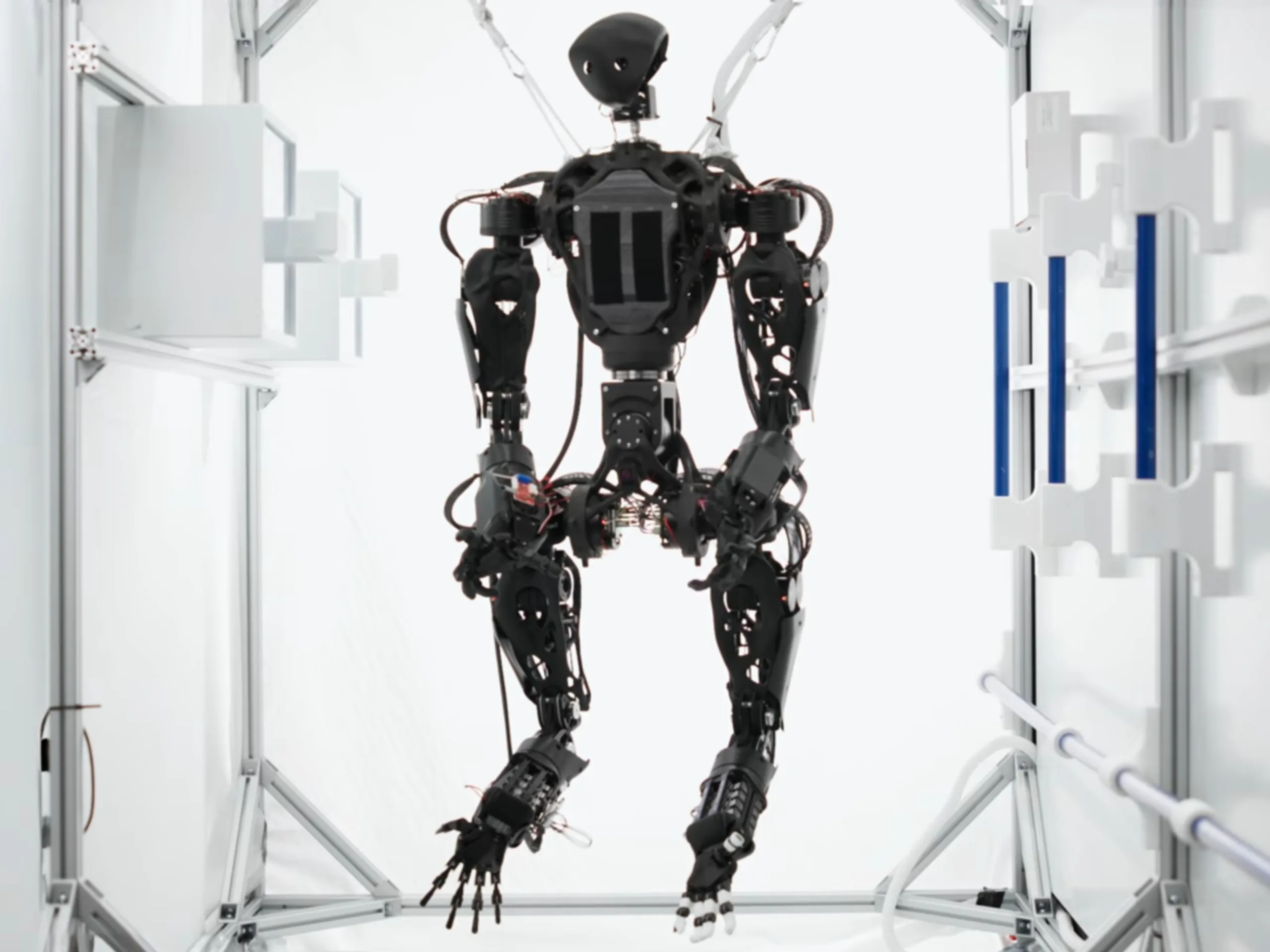
On May 21, 2026, the Swiss ETH Focus Project ORBIT Robotics unveiled its Helios model. The accompanying video was titled “The future is here” – a description that feels quite fitting. Helios has even more science-fiction charm than well-known humanoid robots such as Tesla’s Optimus or Unitree’s G1, as it was developed specifically for use in space. The ORBIT Robotics Helios is intended to support astronauts on space stations in the future. According to the project, a great deal of time is spent on tasks that are necessary but offer little scientific value. These include cargo and inventory workflows such as unloading deliveries, sorting equipment and recording stock levels. ORBIT cites around 35% of crew time for maintenance tasks, around 50 hours for a single cargo unloading cycle and labor costs of roughly 140,000 US dollars per astronaut hour. Helios is designed to make work in space cheaper and more efficient. But why does the robot need four arms?
Technical Concept and Design Rationale
Standing and walking only work under gravity. In microgravity, legs are practically useless and could at most be used to push off surfaces. That is why ORBIT Robotics has simply replaced the legs of its humanoid robot with two additional arms, which are far more useful in weightlessness or microgravity. This should allow the robot to move through station interiors, hold its position and perform tasks at the same time. Helios is also interesting from a technical perspective. Its arms are not moved in the conventional way by heavy motors placed directly at the joints, but by a tendon-driven design. The motors sit close to the shoulders, while spools, cables and redirecting mechanisms transfer force to the joints. This is intended to make the arms lighter and enable smoother movements. A so-called rolling contact joint at the elbow plays an important role here. This joint is designed to combine strength with compliance – robust enough for operational tasks while still allowing controlled, gentle movements.
Arm Architecture Details
Orbit Robotics via YouTube
- Four-arms configuration intended for microgravity efficiency
- Tendon-driven actuation with motors near the shoulders
- Rolling contact joint at the elbow for strength and柔性
Operational and Economic Considerations
In space, the economy of motion matters a lot. The design choices for Helios aim to reduce crew time spent on mundane tasks and lower long-term costs associated with cargo handling, inventory management, and maintenance. The approach of replacing legs with extra arms reflects a bold shift toward weightlessness optimization, suggesting potential gains in task throughput and stability within orbital habitats. The collaboration between biomechanical ingenuity and practical space-operations needs marks a noteworthy step in robotics research, even as real-world deployment challenges remain to be fully proven.
Leave a Reply