
Key Takeaways
1. NASA’s Perseverance rover has been exploring Mars since 2021 and takes pictures to track its movements.
2. Tiny navigation errors can cause the rover to be off by over 100 feet, leading to pauses for guidance from Earth.
3. The new Mars Global Localization technology helps the rover avoid lengthy delays in navigation.
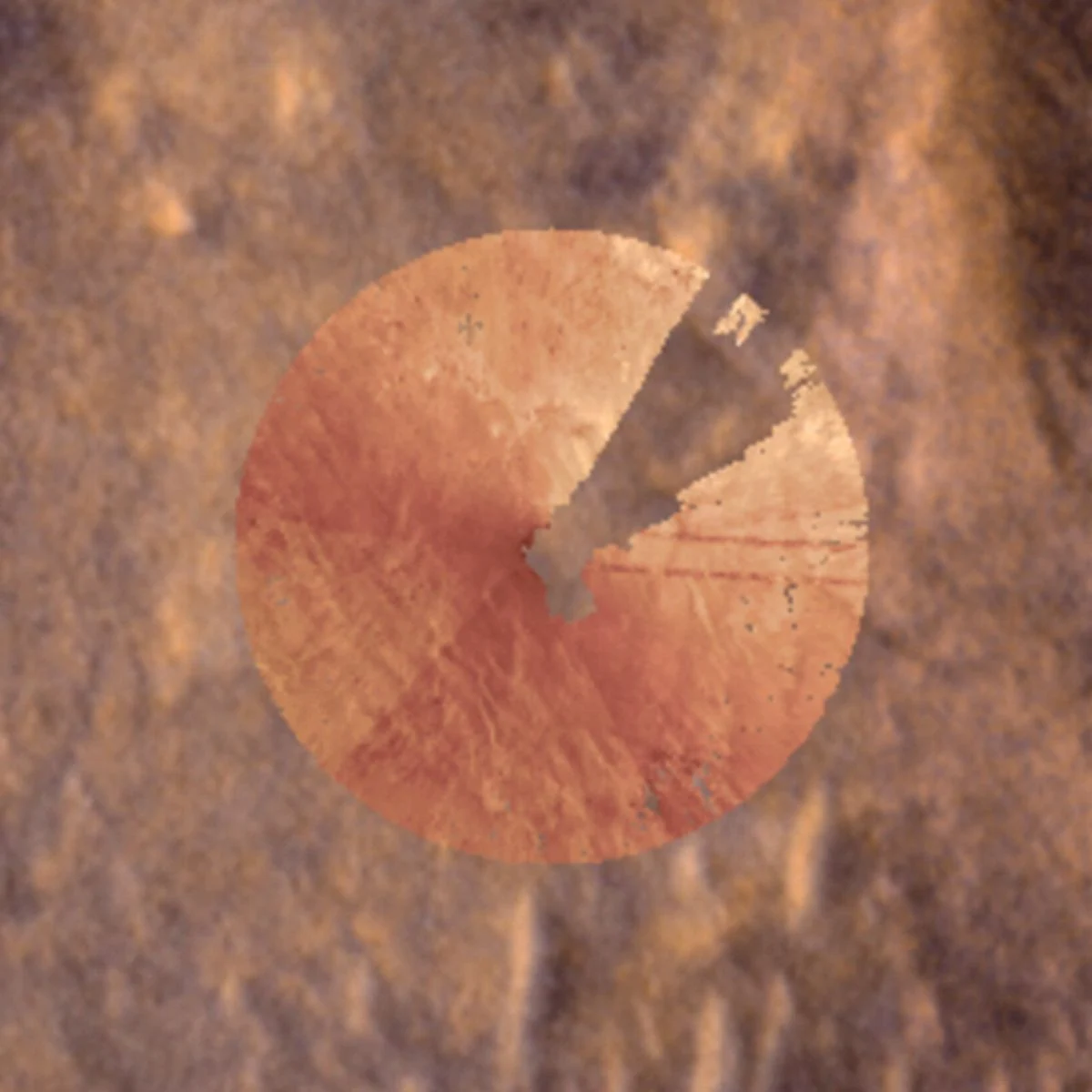
4. On February 2, Perseverance used navigation cameras to create a 360-degree view of “Mala Mala,” resulting in a precise position identification.
5. The onboard algorithm allows Perseverance to autonomously navigate with an accuracy of 10 inches, improving its movement without waiting for Earth commands.
NASA’s Perseverance rover has been roaming Mars since 2021. As it travels across the red planet, the rover snaps pictures every few feet while tracking its wheel movement. However, tiny mistakes add up over time. On long journeys, the rover might end up being off by more than 100 feet, which is around 35 meters. When this occurs, it halts, believing it could be close to risky ground. Then, it waits for guidance from Earth, a procedure that can take a day or longer. The new technology named Mars Global Localization helps to avoid this slow process.
New Technology in Action
On February 2, the navigation cameras (navcam) on Perseverance captured a complete 360-degree view of the area known as “Mala Mala.” This spot is characterized by its lack of distinctive features and is located on the edge of Jezero Crater. The images were combined to create a circular overhead image called an orthomosaic. An onboard algorithm then compared this image to pictures from the Mars Reconnaissance Orbiter (MRO). This technique enabled the rover to identify its position with a precision of 10 inches. Remarkably, the whole operation only took about two minutes.
Improved Autonomy
The algorithm operates on a processor that Perseverance had previously used to communicate with the now retired Ingenuity Mars Helicopter. This advancement allows Perseverance to figure out where it is and keep moving along its planned path without needing to pause and wait for further orders.
Source:
Link